
 |
| Equação para controlar impulsos elétricos em equipamento de reabilitação é trabalho de uma década (Imagem: Reprodução) |
O trabalho de Tiago Roux de Oliveira, professor do Departamento de Eletrônica e Telecomunicações da Universidade do Estado do Rio de Janeiro (Uerj) parece bastante complicado. Só o nome já assusta: equações diferenciais parciais aplicadas à Engenharia de controle, automação e robótica. Passar horas em frente ao computador ou a uma folha de papel para testar e analisar equações até conceber algoritmos capazes de acionar e controlar sistemas complexos ocupa boa parte da rotina do pesquisador. Pode ser difícil de imaginar, mas é desse processo que saem resultados bastante práticos. Roux trabalha com Matemática aplicada, estudando equações de controle que já levaram a um melhor funcionamento de freios com a tecnologia Anti-lock Braking System (ABS) e ao controle de estimuladores elétricos neuromusculares para automação de processos fisioterapêuticos e robótica assistiva. Agora pensa em automatizar radares para que os carros estejam em uma velocidade que favoreça o melhor fluxo na pista. O trabalho de Roux com esse tipo específico de equações é financiado pelo programa Jovem Cientista do Nosso Estado, da FAPERJ.
A elaboração desses algoritmos complexos não aparece da noite para o dia. Pelo contrário, leva alguns anos. Por exemplo, para chegar a um bom resultado na automação de um sistema que controla estímulos elétricos para execução de movimentos de fisioterapia, foram necessárias as pesquisas conjuntas de bolsistas de Iniciação Científica (IC), mestrado e doutorado da Uerj e da Universidade Federal do Rio de Janeiro (UFRJ). Ou seja, quase uma década de trabalho. O objetivo foi permitir que pessoas que sofreram um acidente vascular cerebral (AVC) e que tiveram a comunicação entre cérebro e músculo afetada, voltassem a movimentar seus braços e oferecer mais autonomia em sua reabilitação funcional.
“O roteiro comum a situações que se busca automatizar é a obtenção de um modelo matemático que represente um dado fenômeno físico. Geralmente se utiliza equações diferenciais ordinárias ou parciais nessa etapa. O próximo passo seria o projeto do controlador (equações de controle) baseado nessa modelagem”, diz Tiago Roux. No caso do algoritmo para regular os pulsos elétricos, a melhor solução encontrada pelos pesquisadores foi a de abandonar a modelagem matemática. “A explicação é simples: o modelo matemático que relaciona o estímulo elétrico com movimento de rotação de uma articulação do corpo não é fácil de encontrar, variando de paciente para paciente. E se eu não tenho isso, equações de controle baseadas em um modelo inadequado não irão funcionar. Então é melhor considerar uma abordagem livre de modelos”, conclui o professor também membro da Academia Brasileira de Ciências.
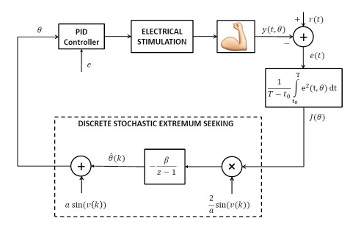
A pergunta que o pesquisador precisou responder para movimentar o braço foi qual a corrente elétrica necessária para que eletrodos acoplados nos músculos bíceps e tríceps do paciente promovessem o movimento de subida e descida do braço e como as equações de controle se adaptariam aos progressos do paciente em alcançar movimentos mais amplos e precisos. Uma vez que cada paciente tem suas próprias características biológicas, o pesquisador optou por abandonar a ideia do modelo e basear seu algoritmo de controle com capacidade de adaptação apenas nas informações do estímulo de entrada e ângulos de saída. “O controle extremal é uma técnica adaptativa de otimização em tempo real que é livre de modelos matemáticos. Você só tem que garantir algumas hipóteses e a partir daí, usando as informações de entrada e saída, você consegue projetar o sistema que vai satisfazer algum critério de desempenho”, detalha.
A principal criação no trabalho que o pesquisador realiza está nos algoritmos de controle. “Algoritmos são equações, essas criadas pela gente, e que vão reger as variáveis de controle. Que vão atuar no sistema. É a partir do algoritmo de controle que você sabe quanto estímulo elétrico você tem que aplicar no paciente”, explica.
Diferentemente daqueles algoritmos que operam na análise de base de dados como as do Facebook, conhecidos como machine learning, os algoritmos desenvolvidos por Tiago Roux e sua equipe não precisam ter a capacidade de aprender a executar uma nova tarefa, apenas se adaptar àquela que eles já desenvolvem. A operação do aparelho inicia com testes para funcionar dentro das margens de efeito do pulso elétrico no paciente sem que lhe cause desconforto ou dor. Também é preciso testar em que local do braço o corpo do paciente responde melhor aos pulsos. A partir daí, o equipamento vai operar dentro das margens de intensidade da corrente estabelecidas inicialmente e irá se adaptar ao avanço da capacidade do movimento de cada paciente.
Aplicação no trânsito e mobilidade urbana
 |
| Tiago Roux procura traduzir fenômenos físicos em equações matemáticas (Foto: Juliana Passos) |
A quantidade de problemas que podem ser descritos a partir das equações diferenciais parciais é enorme. A pesquisa a qual Roux atualmente se dedica é o controle do fluxo de veículos nas estradas. “A gente pode controlar, através de radar, a velocidade dos veículos. E assim, é possível mostrar, a partir dessas equações diferenciais parciais que se você fizer um controle de entrada de veículos e de suas velocidades, é possível evitar esses engarrafamentos gigantescos que temos. Isso poderia ser aplicado na Linha Vermelha, na Linha Amarela, Avenida Brasil, onde temos o tempo todo problemas graves”, diz.
Há alguns anos, a prefeitura da cidade de São Paulo causou polêmica ao limitar a velocidade nas vias marginais. Podemos explicar essa opção com uma experiência que pode ser feita em casa. Basta pegar uma quantidade muito grande de arroz, que aqui tem o papel dos carros, e colocar em um funil de forma apressada, a dificuldade de escoamento será grande. Mas se você coloca aos poucos, todos passarão.
Essa explicação é válida para os momentos de alto fluxo, mas o que fazer quando a pista estiver liberada? O algoritmo de controle extremal que está sendo desenvolvido por Roux em parceria com pesquisadores do Departamento de Engenharia Mecânica e Aeroespacial da Universidade da Califórnia de San Diego (UCSD), será capaz de se adequar a todas as situações. Ao monitorar a entrada e a saída dos veículos em um trecho determinado, o algoritmo será capaz de promover a variação da máxima velocidade permitida na via.
“A gente tem um problema de mobilidade que vai piorar por questões óbvias. A população está crescendo e as políticas públicas nem sempre estão pensando na melhor forma para contornar esses problemas que temos há anos. Mas é possível usar a Matemática, a Engenharia e conceitos mais abstratos de teoria de controle para tentar resolver isso”, finaliza o engenheiro eletricista.